
Mechanický design a výzkum a vývoj odborníků z inženýrského centra Robotech navrhl návrhVedoucí ultra dlouhý příhradový jeřáb. Ukázala inovativní demonstraci výzkumu a vývoje stohovaného jeřábu typu příhradového typu v nestandardním přizpůsobení systému inteligentního skladování, ve kterém velikost zboží přenášela daleko přesahující konvenční zboží, jako jsou obecné paletové materiály. Přímo zasáhl body bolesti průmyslové aplikace s pokročilými akademickými úspěchy.
Pojednání bylo úspěšně publikováno v autoritativním akademickém časopise „Logistics Technology and Application“, pojednání,což plně potvrzuje, že akademické úřady Robotech uznali z hlediska inovací schopnosti a technické sílyStacker Craneprodukty a vybavení.
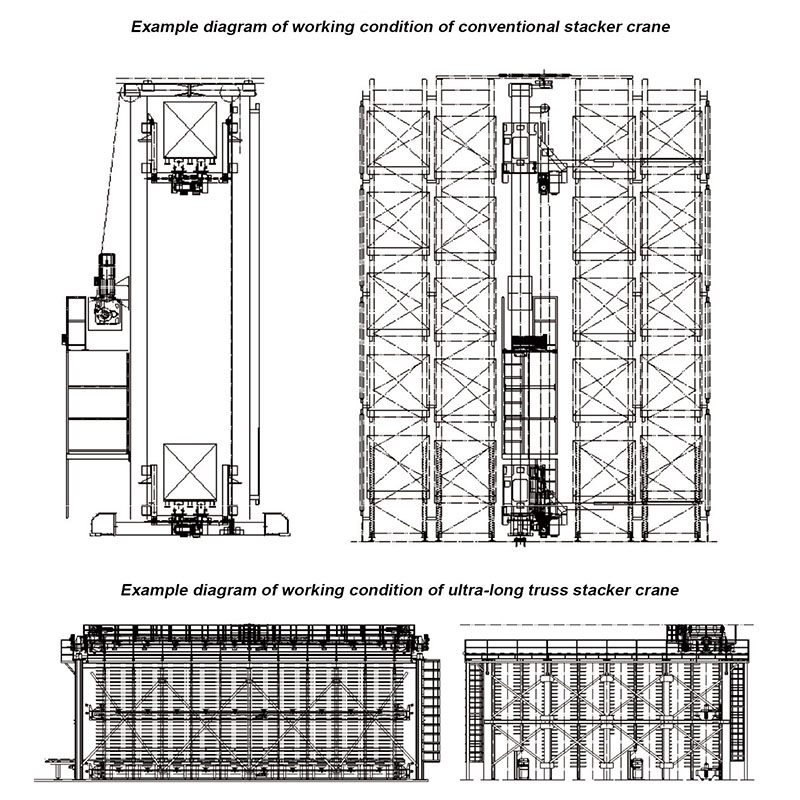
Pojednání hlavněPopisuje jeřáb na stohování používaný pro přepravu zboží mezi ocelovou strukturou typu příhradového typuRakeming.Směr chůze a směr vidlice tohoto typuStacker Cranese liší od těch u konvenčních stohovacích jeřábů a vozovka se mění v horní části regálu. Šířka kovové struktury tohoto typu jeřábu je velmi velká a nakládací platforma je velmi široká. Velikost zboží, které nese, daleko přesahuje velikost konvenčního zboží, jako jsou obecné paletové materiály. Tento druh zboží již nemůže splňovat požadavky na vyzvednutí zboží pomocí tradičních jeřábů nebo konvenčních jeřábů. V reakci na tyto zvláštní potřeby,Tento ultra dlouhý stohovací jeřáb typu Truss může plně splnit požadavky.Na předpokladu zajištění funkcí produktu, návrh super dlouhého příhradového typuStacker Craneje dokončen, kterýZlepšuje míru využití úložného prostoru.
1. Strukturální design
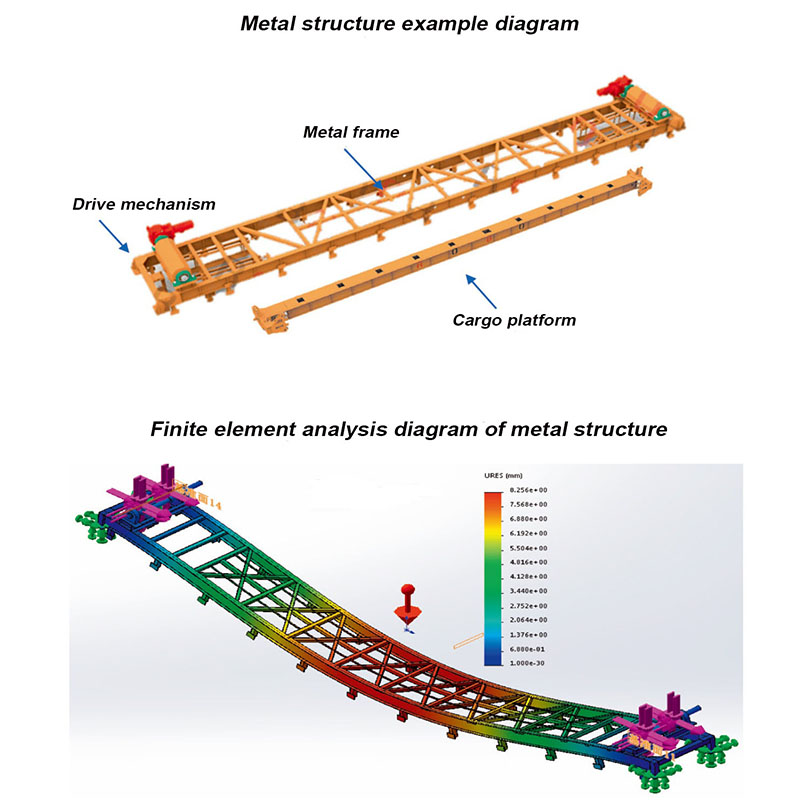
Kvůli zvláštním specifikacím struktury ocelových trubek a jiného zbožíDélka je velmi dlouhá, což daleko překročilo velikost mezinárodní palety. Proto je třeba rozšířit šířku kovové struktury a nakládací platformy a statická vychytávání struktury je mnohem větší než šířka konvenčního jeřábu stohovače. V reakci na tuto nestandardní mechanickou strukturu,RObotechV článku, který by měl být navržen v článku, který by měl být prováděn v procesu vývoje a navrhování, aby byla zajištěna rigidita struktury a vyřešila problém sběru odchylky a provozu způsobené nadměrnou vychýlením.
 2. návrh elektromechanického kombinovaného zařízení
2. návrh elektromechanického kombinovaného zařízení
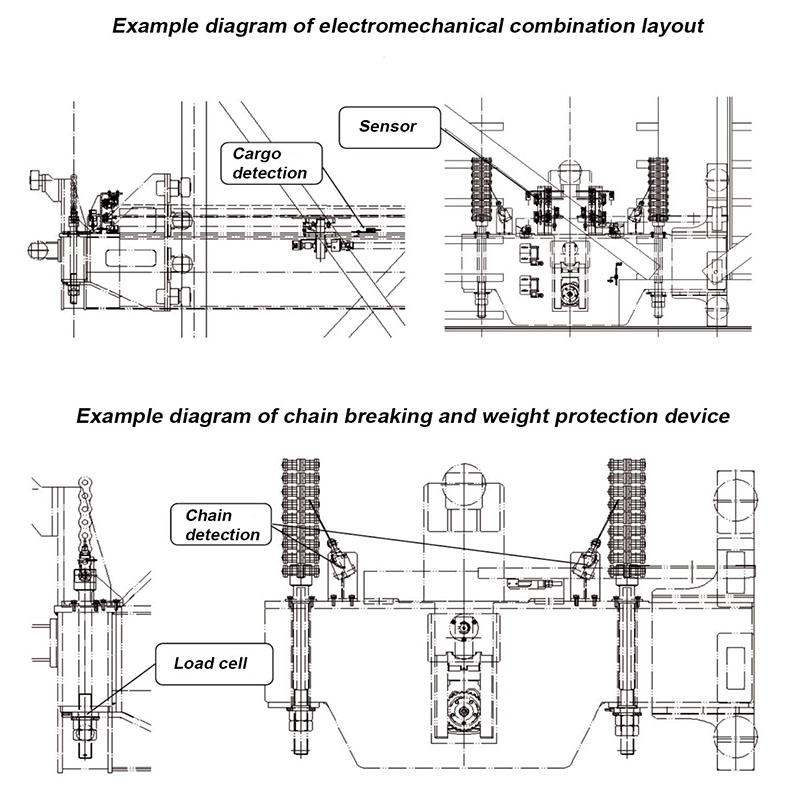
V tomto designu jeřábu na stohovači se pro stanovení pozice používají spolehlivé laserové rozsah a rozpoznávání adresy aPřesnost polohování může dosáhnout ± 3 mm. Pro nákladní zařízení je zařízení pro detekci polohy nákladu vybaveno několika sadami senzorů, jako například nad výškou, přes šířku, zhroucený tvar,a detekce nákladu. Nejen to, že jeřáb Stacker má takéFunkce detekce a detekce vážení řetězu. K detekci řetězce se používají čtyři detekční senzory. Když je řetězec rozbitý, spustí se alarm senzoru a zařízení přestane běžet. Na instalaci řetězu je nainstalována zatížení buňky. Když kvalita zatížení překročí jmenovité zatížení, spustí se alarm zatížení.
S postupným nasycením poptávky po konvenčních skladech již tradiční stohovací jeřáby již nemohou plně uspokojit potřeby moderního průmyslového rozvoje a poptávka po speciálních modelech jeřábů na speciálních průmyslových trzích. V tomto pojednání,Je přijata metoda analýzy konečných prvků a ověření produkce projektu, a je zvažován vliv faktorů, jako je nadměrná vychýlení stohovače typu příhradového typu a asynchronní odchylka hnacího kola.Ultra dlouhý stohovací jeřáb typu příhradového typu může uspokojit potřeby používání a zajistit, aby zařízení běželo stabilně a spolehlivě.
Nanjing informuje úložné zařízení (Group) Co., Ltd
Mobilní telefon: +86 25 52726370
Adresa: č. 470, Yinhua Street, Jiangning District, Nanjing CTIY, Čína 211102
E-mail:[chráněno e -mailem]
Čas příspěvku: červen-09-2022


